随着城市汽车保有量的提升,泊车难、泊车烦的问题也愈加突显。停车场内车位难找、停车耗时、寻车困难,这不仅影响人们的出行效率,还给城市交通带来了不小的压力。

面对泊车难题,诸多企业、高校、科研院所围绕自主代客泊车(AVP,Automated Valet Parking)技术开展研究,希望能够利用智能化手段实现车辆在停车场内的自动泊车,将用户从泊车过程中解放出来。
近年来随着车路云一体化技术的兴起,从单车智能向场端智能的发展趋势也愈加明显,车辆与停车场之间不再是独立的个体与场景,而是互相融合构建新的自动泊车技术体系。

因此,上海交通大学智能网联电动汽车创新中心(下简称“中心”)的杨明、庄瀚洋、王亚飞、贺越生、吴晓东等多位老师与合作伙伴共同探索并实践,提出一种场端智能自主代客泊车技术路线,这种方式能够充分利用车路云一体化的优势,将智慧赋予停车场、将泊车变成服务。
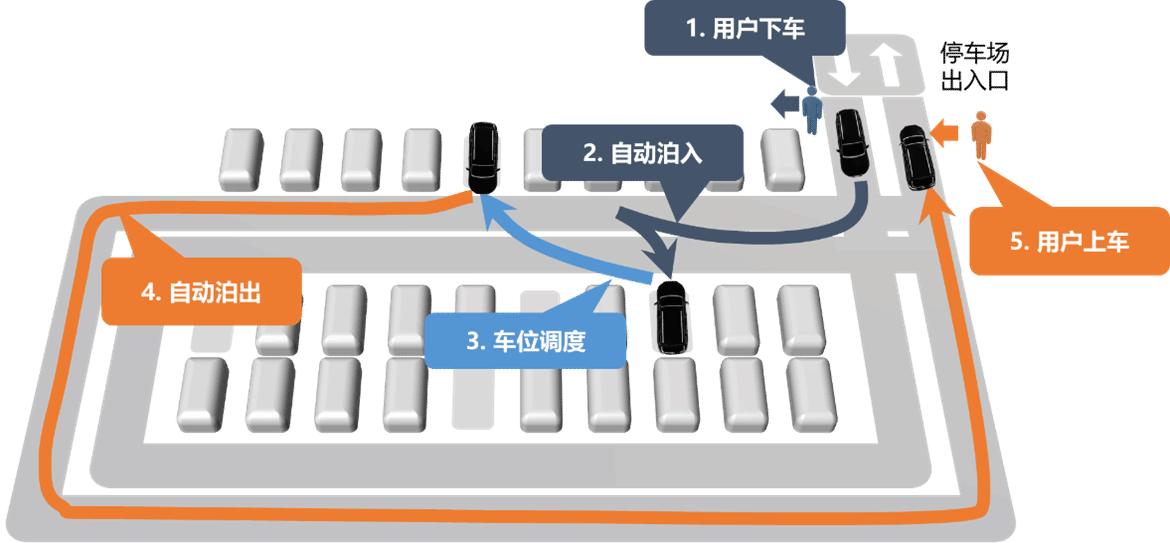
场端智能AVP是利用停车场部署的传感器、控制器等,提升停车场的智能水平,从而降低对车辆智能化的要求。该技术具有如下优点:
1、车辆的智能水平要求低,只需通信和线控功能便可进行自主代客泊车。
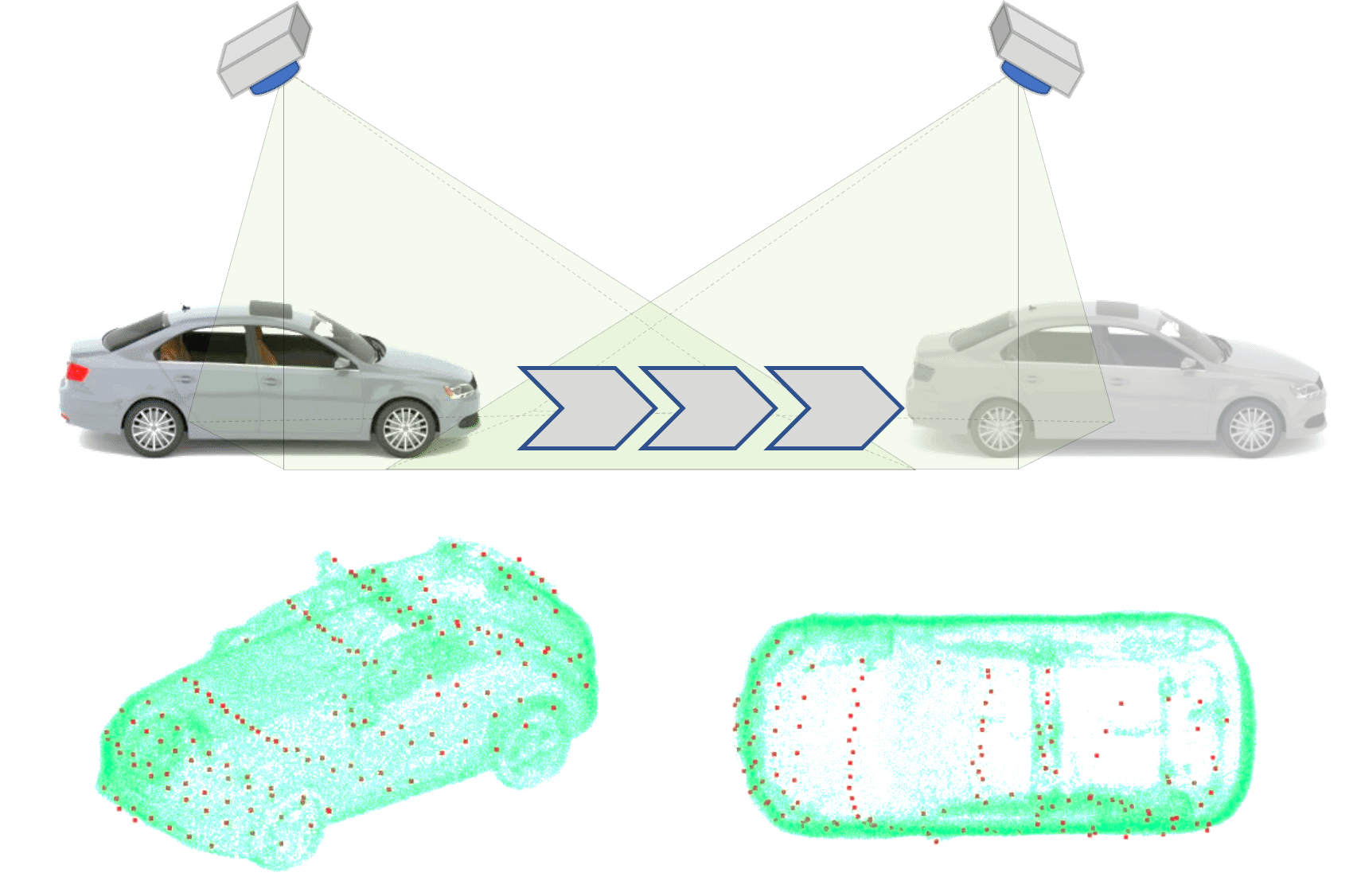
2、场端传感器视野覆盖更广,能够有效识别单车智能盲区内的障碍物。
3、场端智能具有全局信息,能够以停车场整体效率的最优进行车辆调度。

项目团队自研场端感知系统与场端管理系统中的核心算法,在上海交大的龙宾楼地下停车库和广州南沙的珠江湾地面停车场分别进行了场端智能AVP系统的落地验证。
龙宾楼地下停车库的场端智能AVP系统
原文链接:https://mp.weixin.qq.com/s/UzhN4wtUCWtk_0sO7yxoOg


