上海交通大学智能网联电动汽车创新中心团队在控制领域顶刊IEEE Transactions on Control Systems Technology上发表题为“Vehicle Sequencing at Signal-Free Intersections: Analytical Performance Guarantees Based on PDMP Formulation”的研究论文。这项创新性的研究填补了智能网联汽车队列在无信号灯路口的车辆排序宏观性能分析的理论保证的空白。
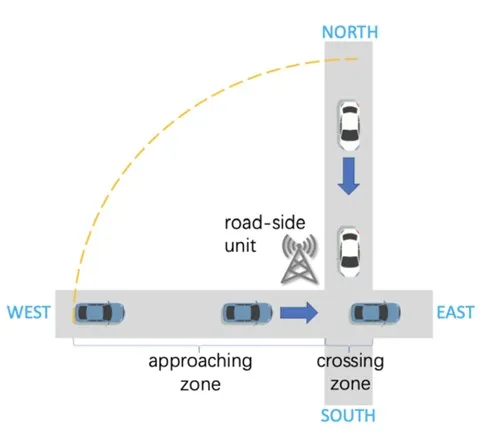
随着智能网联车技术的快速发展,无信号灯路口成为交通管理领域的创新应用之一。传统信号灯控制的路口存在固定周期,限制了交通流的动态调节,而无信号路口通过智能网联汽车和道路控制单元来获取信息,进而规划车辆的排序以及轨迹,实现车辆高效的通行顺序安排。本文聚焦于无信号路口的车辆排序问题,利用分段确定性马尔可夫过程(PDMP)模型进行理论分析,以评估不同排序策略的宏观性能,如路口吞吐量和车辆平均延误时间。
近年来,智能网联汽车车辆在单车智能方面,尤其是轨迹规划和自动驾驶方面取得了显著进展,但对无信号灯路口等宏观场景的研究相对较少,尤其在宏观性能的理论保证方面存在不足。现有研究大多采用排队论或优化方法来分析交叉口的通行效率,然而这些方法难以直接解决车辆排序与性能指标之间的定量关系问题。部分文献通过仿真或启发式算法对常见的排序策略进行了初步评估,但尚未形成系统的理论框架来分析不同策略的性能差异。
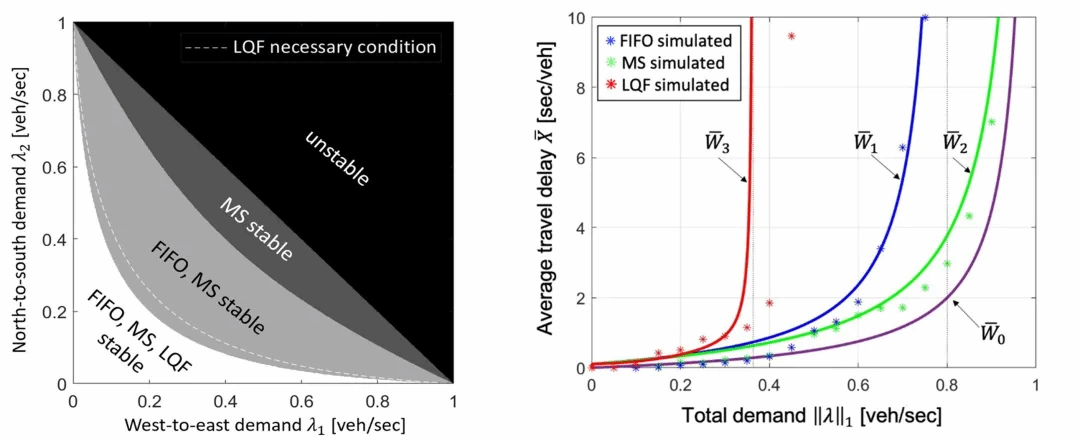
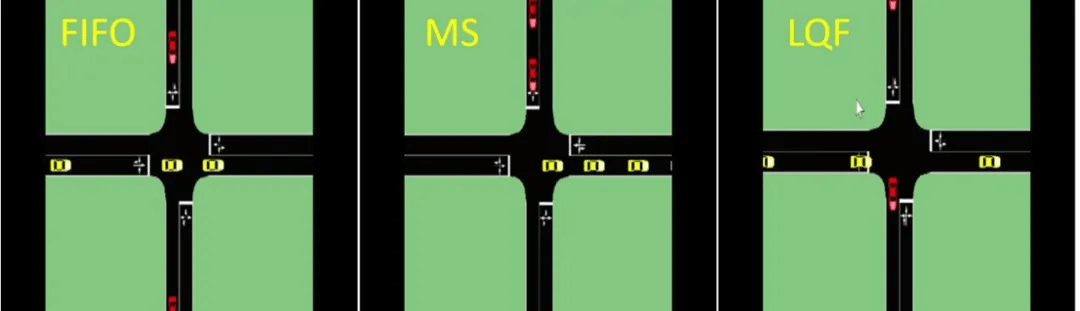
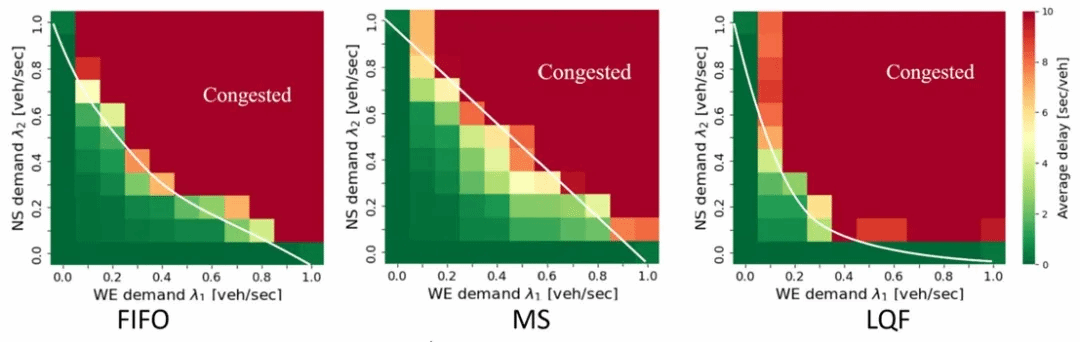
为综合解决无信号灯路口的车辆排序问题,本文提出了一种基于分段确定性马尔可夫过程(PDMP)的理论框架,用以分析和量化不同车辆排序策略的路口吞吐量与车辆平均延误时间的表现。本文分别对三种典型排序策略:先进先出(FIFO)、最小切换时间(MS)和最长队列优先(LQF),进行了详细的理论分析,推导出每种策略下的系统稳定性条件以及上界平均延误时间。通过设计Lyapunov函数并结合Foster-Lyapunov稳定性理论,本文成功地建立了排序策略与宏观性能指标之间的定量关系。最后,通过微观仿真验证了理论结果,发现MS策略在提高通行能力和降低延误方面具有明显优势,而LQF虽然能更公平地分配延误,但其整体表现较差。
金力,上海交通大学密西根学院副教授。研究方向为网络控制,侧重利用随机控制、强化学习、博弈论等理论工具,分析并提升网络系统信息物理安全及人机互动效率。应用场景包括交通运输、航空航天、生产物流、数据传输等。本科毕业于上海交通大学机械工程及自动化专业,硕士毕业于美国普渡大学机械工程专业,博士毕业于美国麻省理工学院运输工程专业。曾任美国纽约大学坦顿工学院助理教授。2021年加入现单位,并担任上海交通大学自动化系双聘教师、智能网联电动汽车创新中心核心成员。IEEE高级会员,国家级青年人才计划入选者。累计指导博士生9人、硕士生3人。主讲“智慧城市中的决策问题”“应用数学方法”“随机控制与强化学习”等课程。
原文链接:https://mp.weixin.qq.com/s?__biz=MzU1MTc0NTI1MA==&mid=2247492075&idx=1&sn=b8573519ccd845c7db915af2528d1046&chksm=fb8e0266ccf98b7072b6fe3c04254b2bb10b141fcc9c8c40918c1e8fa4cfe3e76be5624a7800&token=1538501505&lang=zh_CN#rd


