上海交通大学智能网联电动汽车创新中心吴晓东老师团队在智能交通领域顶刊IEEE Transactions on Intelligent Transportation Systems上发表题为“Human-Vehicle Shared Steering Control for Obstacle Avoidance: A Reference-Free Approach with Reinforcement Learning”的研究论文。文章提出了一种联合模仿学习与强化学习的人机协同控制框架,解决了智能车辆在无参考(reference-free)轨迹场景下的避障决策及控制问题。
近年来,智能驾驶技术的发展在减轻驾驶员工作负荷、提升道路安全等方面发挥了积极作用。考虑到现实交通环境的复杂多变,以及人工智能技术存在的缺陷,完全自动驾驶在短期内仍难以实现。因此,本文聚焦于人车共享驾驶技术架构,将驾驶员保留在车辆控制回路中,以充分利用人类智慧在态势感知、综合决策、环境适应等方面的优势。在此类架构中,驾驶员与智能系统共享车辆控制权,通过相互协作完成驾驶任务。
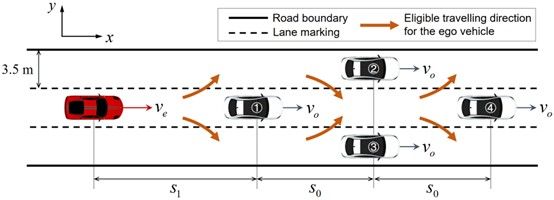
在人机共驾模式中,机器智能系统需要及时干预和纠正驾驶员的风险驾驶行为,避免事故的发生。常见的控制权分配策略包括构造函数、模糊控制、博弈论等方法。车道保持和路径跟踪是现有共享转向控制研究的主要应用场景。然而,由于行驶线路固定,在很大程度上限制了驾驶员的操控自由。另一类目标场景称为无参考轨迹场景,例如换道、路口转向等,驾驶员在路径选择与个性化决策方面拥有更高的自由度。目前相关的研究较少。
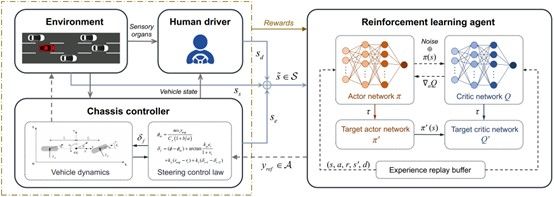
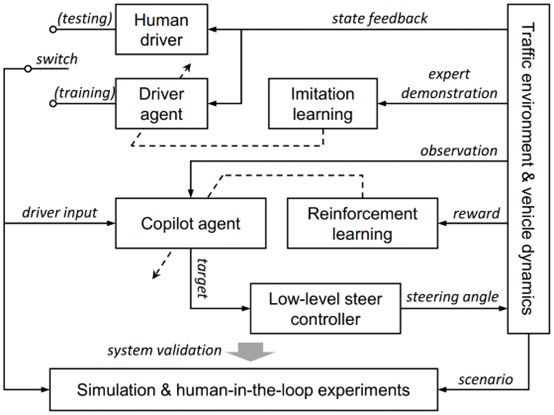
为综合解决无参考轨迹场景下的共享转向控制问题,本文提出了一种联合模仿学习与强化学习的人车共享控制框架。首先,利用生成对抗模仿学习(GAIL)搭建并训练个性化类人驾驶员行为模型,用于后续Copilot智能体训练交互过程。其次,构建了面向人机协同的马尔可夫决策过程(MDP),对比分析利用DQN、DDPG、TD3等强化学习方法训练Copilot智能体,通过奖励函数塑形与分阶段训练优化实现高效策略学习。最后,通过驾驶员在环测试验证了所提方法在提升驾驶安全性、实现驾驶员意图解码与同步的有效性。实验统计结果也表明了共享驾驶系统在降低驾驶员工作量、保证驾驶自由度等方面具备显著优势。


吴晓东,2011年毕业于日本立命馆大学,获机械电子专业工学博士学位,目前任上海交通大学机械与动力工程学院副教授,博士生导师。现担任中国自动化学会车辆控制与智能化专业委员会委员,中国汽车工程学会转向技术分会委员,上海市电子学会理事委员,上海市经济和信息化委员会技术专家,Automotive innovation、Machines期刊编委等职务。主要从事先进车辆底盘控制技术以及底盘线控化、智能化方面的研究,包括线控转向技术、线控制动技术、智能驾驶技术等,进行了大量基于软件和硬件平台的实验实践。主持国家科技部重点研发专项、自然科学基金、教育部基金、国际合作项目、产学研合作项目等几十项,相关成果在国内外学术期刊和国际学术会议上发表论文 50 余篇,出版著作 2 部,发明专利 10 余项。先后荣获“第三届中法团队合作创新奖之首创奖”,“源创杯颠覆性技术创新创意大赛优秀奖”,“IEEE国际信息与自动化学会优秀论文奖”等奖励。
原文信息:
L. Yan, X. Wu, C. Wei and S. Zhao, "Human-Vehicle Shared Steering Control for Obstacle Avoidance: A Reference-Free Approach with Reinforcement Learning," in IEEE Transactions on Intelligent Transportation Systems, doi: 10.1109/TITS.2024.3420894.
原文链接:https://mp.weixin.qq.com/s?__biz=MzU1MTc0NTI1MA==&mid=2247492109&idx=1&sn=b6b108cbe00345d00b3636f3dc4db7e3&chksm=fb8e0180ccf988965ff3cc6ca3a304affc57ed117c1b9333236b46bd0a1eaa52f690e94e6171&token=182573694&lang=zh_CN#rd


