上海交通大学智能网联电动汽车创新中心王亚飞老师团队在IEEE Transactions on Vehicular Technology上发表题为“Vehicle Lateral Dynamics-Inspired Hybrid Model Using Neural Network for Parameter Identification and Error Characterization”的研究论文。文章提出了一种新型物理模型和数据驱动模型融合的架构,并在理论上证明了该混合模型的误差刻画能力,为自动驾驶汽车精准轨迹跟踪和控制提供了基础模型支撑。
混合建模架构
高精度横向动力学模型是智能网联汽车精准轨迹跟踪和控制的基础。传统的物理建模方法采用物理规律描述车辆动力学特性,并构建物理模型,但建模简化和不准确参数会导致模型精度不高。近年来,数据驱动方法被逐渐应用,依托神经网络优异的非线性刻画能力,显著提升了建模精度,但数据驱动模型缺乏物理可解释性且泛化性差。物理模型和数据驱动模型均难以满足智能网联汽车对模型精度和可靠性的要求。此外,现有的物理和数据混合建模多采用模型叠加架构,存在稳定性不足和模型退化的问题。
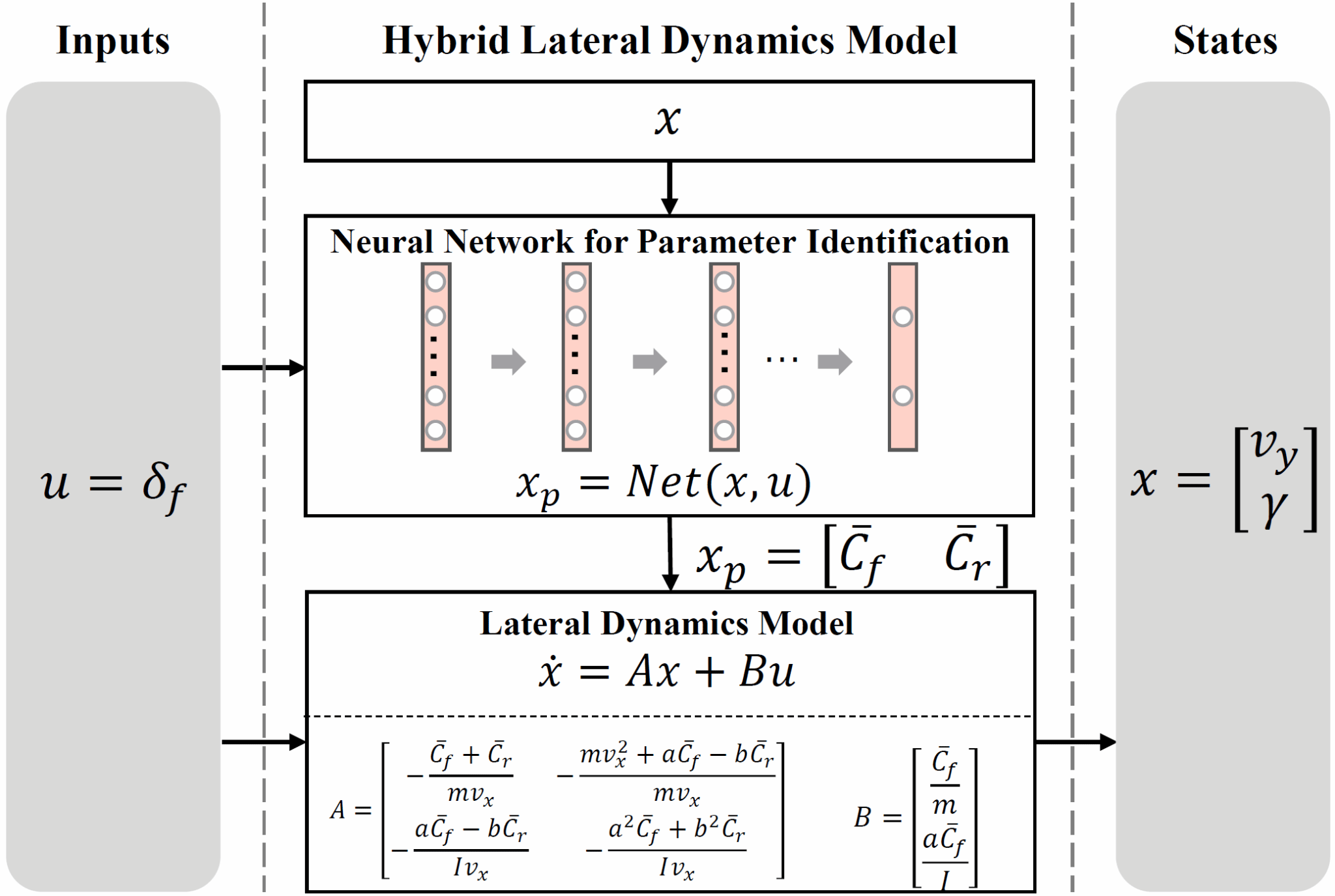
为解决上述难题,文章提出了一种车辆横向动力学物理模型启发的混合建模架构,融合物理规律和数据构建精度高、泛化性强的车辆动力学模型。该架构采用神经网络进行参数辨识和误差描述,利用物理模型刻画状态迭代关系,然后将神经网络嵌入物理模型,构建车辆动力学混合模型,从而实现精度高、泛化性强的车辆动力学建模。
文章从车辆横向动力学物理模型出发,分析了误差来源,通过模型重构,将误差描述和参数识别问题统一为复合参数辨识问题。通过神经网络参数辨识方法的提出,利用数据对复合参数进行描述,有效融合了物理规律和数据对车辆动力学的刻画能力。仿真与试验结果表明,该混合模型较传统的物理模型和数据驱动模型精度更高,泛化能力更强。文章的贡献主要包括车辆动力学混合建模架构以及基于神经网络的车辆参数辨识方法。
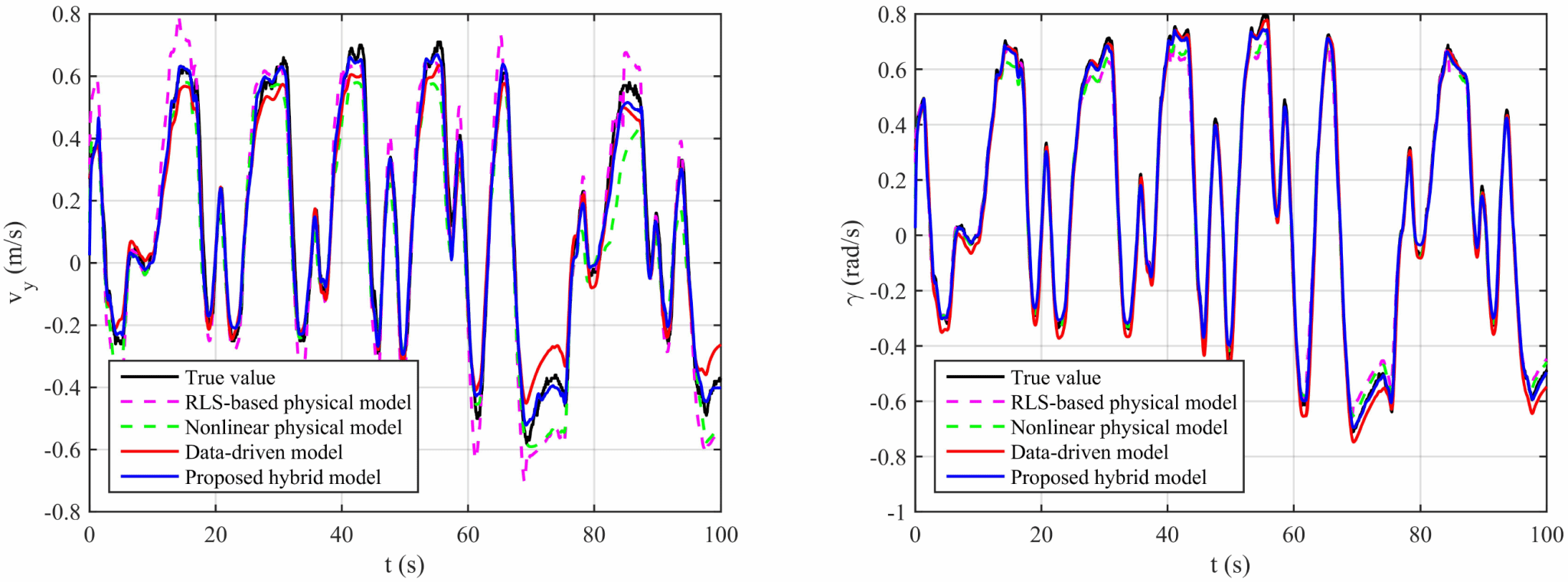
建模精度评估:混合模型精度优于物理模型和数据驱动模型
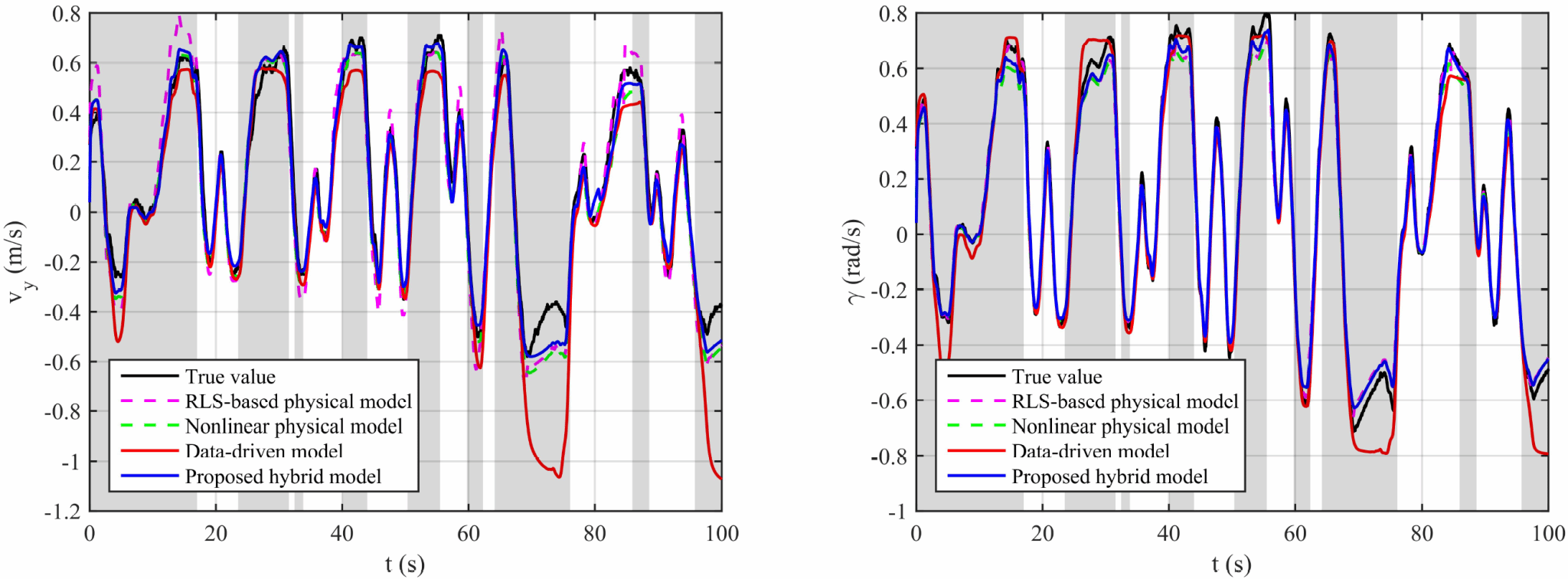
泛化性能评估:混合模型在未训练工况(阴影区域)的泛化性优于数据驱动模型
王亚飞,上海交通大学机械与动力工程学院教授,入选国家高层次青年人才、交通运输部青年拔尖人才。研究方向为特种车辆无人驾驶建图与规划、车路协同感知定位。主持科技部重点研发计划课题、国家自然科学基金和企事业单位合作项目40余项,发表中英文论文100余篇,授权国内外发明专利30余项,参与制定国家标准4项。现任IEEE Vehicular Technology Magazine副主编、ASME Journal of Dynamic Systems, Measurement, and Control副主编、《汽车工程学报》青年编委、《汽车工程》青年编委、《中国公路学报》青年编委、中国汽车工程学会青委会副秘书长等职。

原文链接:https://mp.weixin.qq.com/s?__biz=MzU1MTc0NTI1MA==&mid=2247492139&idx=1&sn=ef1161622427d5fadbfc12988a019e91&chksm=fb8e01a6ccf988b073858596c0a11ce7c9bf02f9de6bd350ce485da99432da83be30607ebbd2&token=123222825&lang=zh_CN#rd


