上海交通大学智能网联电动汽车创新中心在IEEE Transactions on Circuits and Systems for Video Technology上发表题为”FP-TTC: Fast Prediction of Time-to-Collision using Monocular Images”的研究论文。文章提出了一种快速高效的碰撞时间预测算法,从历史视频图像中预测场景物体与观测者的碰撞时间,为智能车避障和主动安全算法提供了新的技术支撑。IEEE TCSVT是中科院一区的SCI期刊,本文一作是硕士研究生李长霖,本文共同通讯作者是钱烨强和杨明老师。研究成果现已开源在 https://github.com/LChanglin/FP-TTC。
碰撞检测是智能车主动安全技术中的核心算法。传统基于目标检测的方法能够对车辆、行人等常规目标做出快速响应,但难以处理驾驶场景中其他导致碰撞事故的长尾场景。近年来,基于碰撞时间(Time-to-Collision,TTC)估计算法的碰撞检测框架鲁棒稳定地解决了长尾场景中的碰撞障碍物检测问题。然而,现有的碰撞时间估计算法受限于复杂的网络结构设计、高昂的计算成本和多帧推理带来的系统延迟,难以部署到车载计算平台上运行。
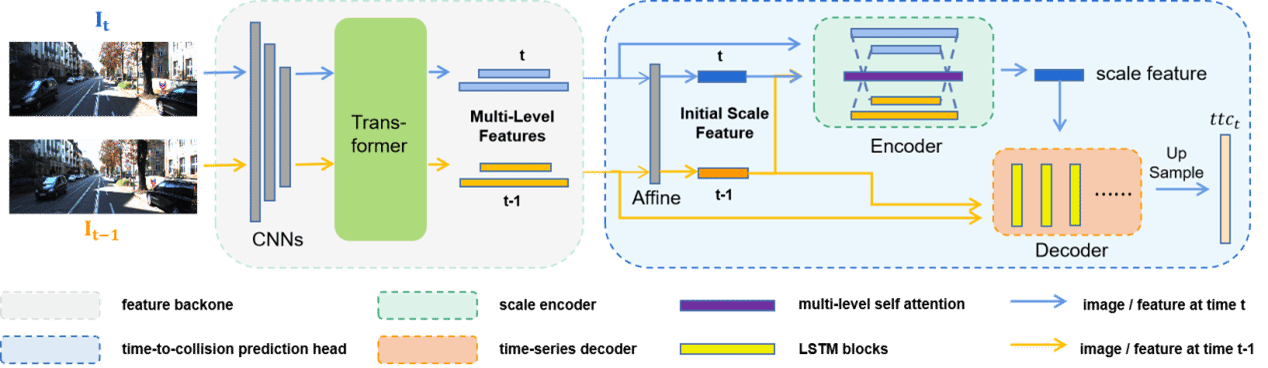
为解决上述问题,本文提出了一种全新的碰撞时间预测(TTC Prediction)算法。对比现有的碰撞时间估计方法,文章主要从算法计算开销和推理模式上进行了两处创新与改进:1. 算法采用基于多尺度特征的可变注意力建模方法,在避免基于高复杂度特征相关性计算的同时,实现了对场景尺度变化的精确建模;2. 本文框架使用历史时刻的图像作为输入,通过对历史运动状态的建模,预测当前时刻的碰撞时间。这种推理模式的改进使得碰撞检测系统可以以更高的响应速度实现避障功能。
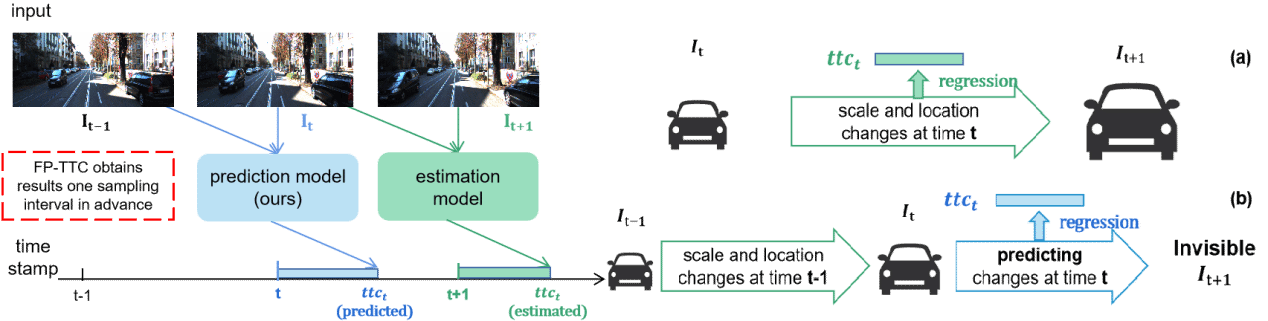
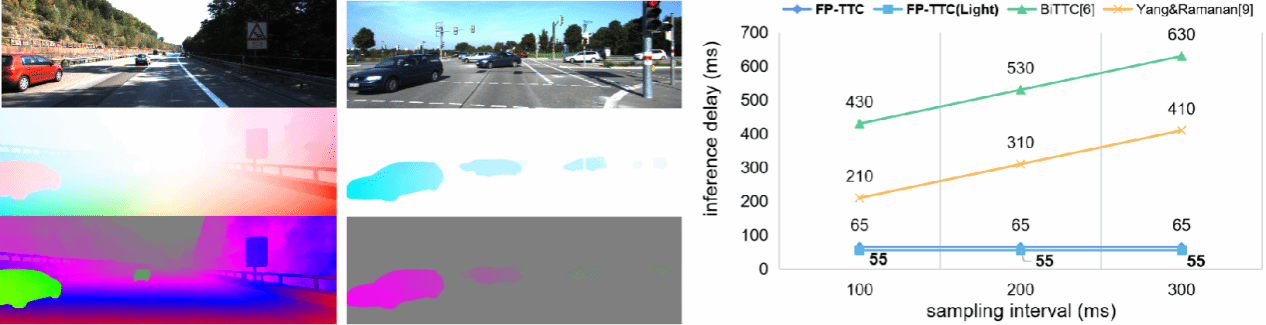
文章还提出了两个额外的改进点:更轻量化的碰撞时间预测算法、基于碰撞时间预测框架的多任务预测算法。通过优化尺度建模方案和联合多任务学习能力,文章提出的算法在推理速度、算法精度和系统响应速度上均达到了最佳性能。 对比现有方法,算法具有5.5倍的推理速度提升、20%的精度提升以及低速场景中10倍响应速度的提升。
原文链接:https://ieeexplore.ieee.org/document/10695124
代码链接:https://github.com/LChanglin/FP-TTC

李长霖,上海交通大学电信学院自动化系,硕士研究生。主要研究方向为智能车视觉感知和碰撞检测算法,研究成果在IROS、T-CSVT等机器人和计算机视觉领域的会议/期刊上发表。

钱烨强,上海交通大学电信学院自动化系,长聘教轨副教授,博士生导师。研究方向为智能驾驶感知与导航系统。近年来以第一/通讯作者身份在IEEE Transactions系列发表长文10余篇,主持包括国家自然科学基金面上、青年在内的多个项目。

杨明,上海交通大学电子信息与电气工程学院特聘教授,博士生导师,密西根学院党委书记,智能网联电动汽车创新中心主任,国家“万人计划”科技创新领军人才。现任中国自动化学会智能车工委会副主任和教工委副主任、中国人工智能学会理事和智能机器人专委会副主任、IEEE IROS-CPRB副主编、《IEEE Transactions on Intelligent Vehicles》和《IEEE Transactions on Intelligent Transportation Systems》期刊编委。长期从事无人车和智能机器人等方面教学与研究工作,近年来在国内外学术刊物上发表论文200余篇,获国家发明专利授权50余项,指导学生多次获得IEEE Intelligent Vehicle Symposium、中国智能机器人大会等国内外顶级会议优秀论文。作为负责人,先后获得上海市技术发明一等奖、上海市教学成果一等奖、教育部技术发明奖等奖项。研究方向为低速无人驾驶系统。
原文链接:https://mp.weixin.qq.com/s/4gcUGAqkLzP77EoCiUTZtw


