上海交通大学智能网联电动汽车创新中心杨明老师团队在机器人领域旗舰会议IROS会议上发表了题为 "Active Vehicle Re-localization Based on Non-repetitive LiDAR with Gimbal Motion Strategy" 的研究论文,为基于地图匹配的车辆重定位提出了创新的解决方案。通过将非重复扫描LiDAR安装在两轴云台上,并结合主动云台运动策略,有效解决了传统多层LiDAR在视场范围和动态干扰适应性方面的不足,提高了在复杂环境下的重定位精度与鲁棒性。
基于地图匹配的车辆重定位在无GNSS信号场景中有着广泛应用。然而,传统多线3D LiDAR虽然具备360°水平视场(FoV),但在动态干扰和环境感知范围上存在局限性,例如稀疏的远距离点云密度、有限的垂直视场以及障碍物遮挡等问题。新型非重复扫描LiDAR通过时间堆叠实现了稠密点云几何结构的构建,但其狭窄的视场限制了单个设备的适应性。
现有重定位方法多依赖传统多线LiDAR提供的全景感知能力,但在高动态场景下,动态障碍物会遮挡环境中的静态结构,导致重定位性能下降。此外,当前研究较少考虑非重复扫描LiDAR的独特特性,例如堆叠点云密度和长感知距离。
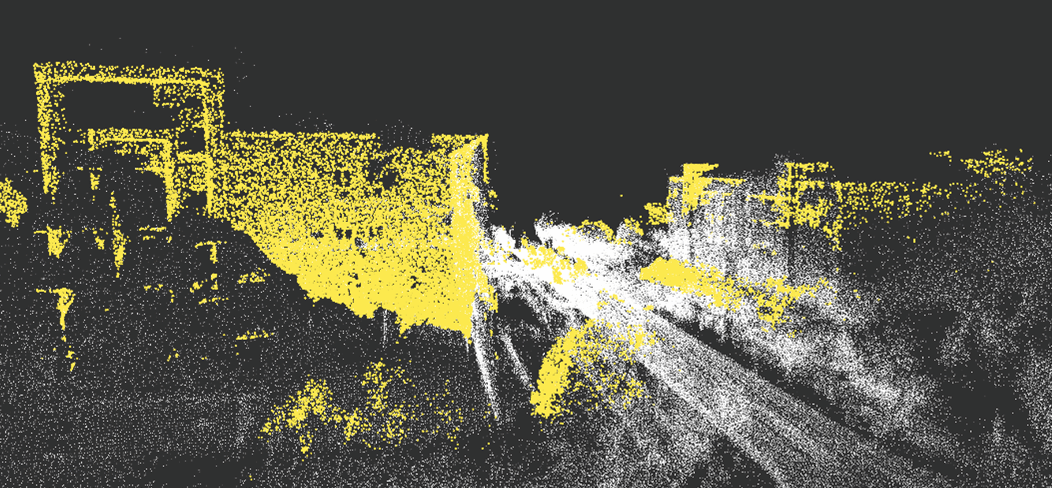
为综合解决上述问题,论文提出了一种基于非重复扫描LiDAR和云台的主动重定位系统。该系统通过将LiDAR安装在两轴云台上,结合主动云台运动策略,实现了对传统多线LiDAR视场局限的突破。在地图构建阶段,系统利用云台的角度反馈逐步覆盖上方半球视场,补充传统LiDAR无法获取的高程结构。在重定位阶段,系统通过空间分割和法向量统计,动态选择环境中的强几何约束区域作为目标区域,优化LiDAR的视场方向以增强匹配性能。实验结果表明,该系统在复杂场景下相较传统多线LiDAR具有更强的鲁棒性,并能在动态遮挡条件下有效完成重定位任务。


原文信息:
Xin'ao Wu, Chenxi Yang, Yiyang Guo, Hanyang Zhuang, Chunxiang Wang and Ming Yang*, Active Vehicle Re-localization Based on Non-repetitive LiDAR with Gimbal Motion Strategy, 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2024), Oct. 14-18, 2024, Abu Dhabi, UAE

吴新奥,目前正在上海交通大学电子信息与电气工程学院攻读控制科学与工程硕士学位。主要研究领域是自动驾驶和无人机系统中的建图定位。他目前的研究内容为主动云台控制下的激光建图与定位。

杨明,上海交通大学电子信息与电气工程学院特聘教授,博士生导师,密西根学院党委书记,智能网联电动汽车创新中心主任,国家“万人计划”科技创新领军人才。现任中国自动化学会智能车工委会副主任和教工委副主任、中国人工智能学会理事和智能机器人专委会副主任、IEEE IROS-CPRB副主编、《IEEE Transactions on Intelligent Vehicles》和《IEEE Transactions on Intelligent Transportation Systems》期刊编委。长期从事无人车和智能机器人等方面教学与研究工作,近年来在国内外学术刊物上发表论文200余篇,获国家发明专利授权50余项,指导学生多次获得IEEE Intelligent Vehicle Symposium、中国智能机器人大会等国内外顶级会议优秀论文。作为负责人,先后获得上海市技术发明一等奖、上海市教学成果一等奖、教育部技术发明奖等奖项。研究方向为低速无人驾驶系统。
原文链接:
https://mp.weixin.qq.com/s/ZVcxn1ja1ePwIpHzKNToaw


