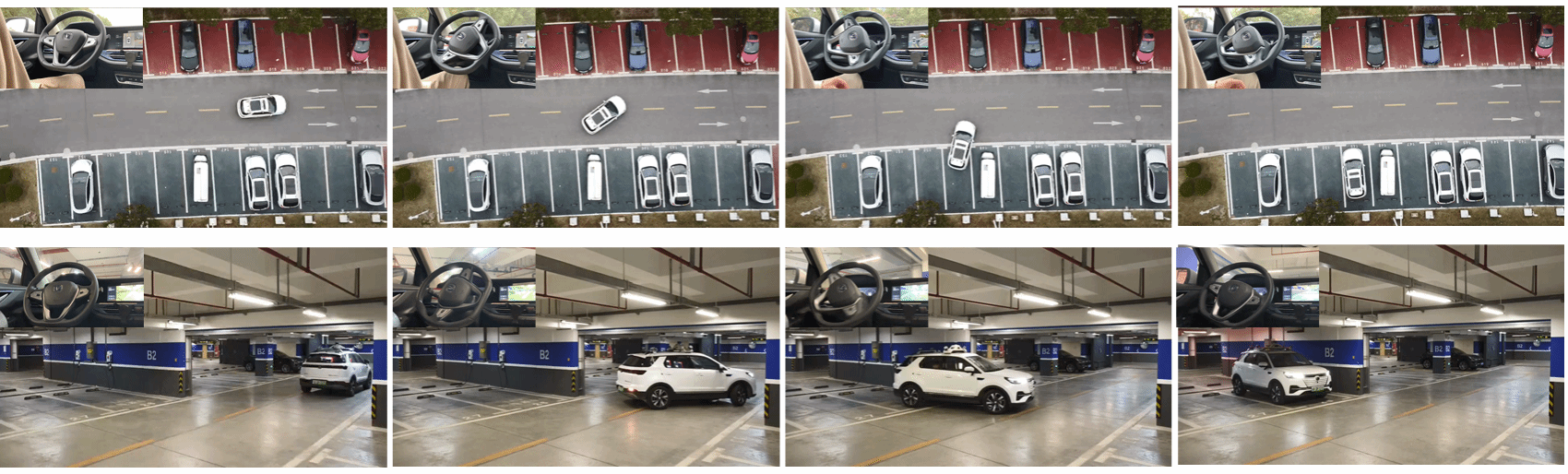
上海交通大学智能网联电动汽车创新中心秦通老师团队在机器人领域旗舰会议IROS会议上发表了题为 "ParkingE2E: Camera-based End-to-end Parking Network, from Images to Planning" 的研究论文,为提高自动泊车任务性能提供了创新性的解决方案。该研究提出了一种基于视觉的端到端泊车神经网络,通过模仿人类驾驶轨迹,直接从环视相机图像生成泊车轨迹。算法在多种真实场景中进行了测试,展现出良好的泊车能力。
自动泊车是智能驾驶领域的重要任务之一。传统的基于规则的泊车方法因其算法设计的复杂性,在狭窄车位或复杂场景中往往表现不佳。随着端到端神经网络技术的发展,通过模仿专家驾驶行为,实现从感知到规划的整体优化,已成为解决泊车问题的一个潜在方向。然而,目前许多研究主要集中于模拟环境中,缺乏实际验证,且存在模型计算资源需求高和真实车辆部署难等问题。
当前端到端自动驾驶技术已在城市驾驶任务中取得了一定的进展,但针对泊车场景的研究相对较少。大多数方法依赖于基于模块化的方案,存在信息损失与累积误差的问题。
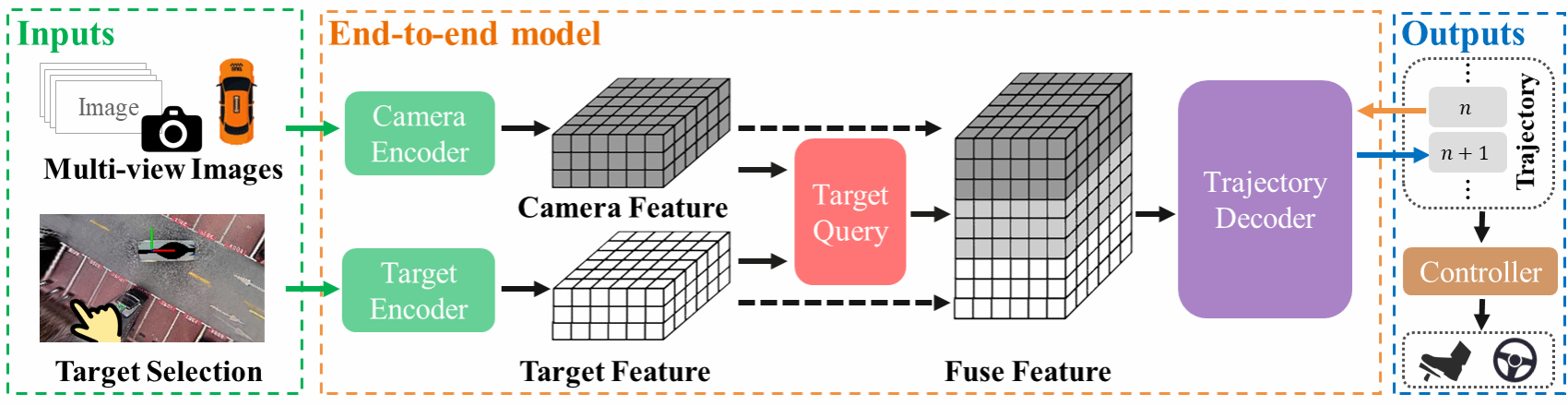
为综合解决上述问题,论文提出了一种基于相机的端到端泊车方案。该方案中神经网络以环视相机图像和目标车位信息为输入,通过目标查询机制实现了相机特征和目标特征在鸟瞰图视角下的特征融合,并采用基于Transformer的解码器自回归生成未来一段时间内轨迹点,而后交给车辆控制器执行。本文所提方法克服了传统方法中的信息损失问题。
原文信息:
Changze Li, Ziheng Ji, Zhe Chen, Tong Qin*, Ming Yang, ParkingE2E: Camera-based End-to-end Parking Network, from Images to Planning, 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2024), Oct. 14-18, 2024, Abu Dhabi, UAE
李长泽,目前正在上海交通大学溥渊未来技术学院攻读控制科学与工程博士学位。主要研究领域是自动驾驶和无人机系统中的感知、定位等。他目前的研究活动包括端到端自动驾驶、视觉SLAM、3D泼溅等。

秦通,上海交通大学溥渊未来技术学院,长聘教轨副教授。研究方向为智能驾驶感知、构图、定位;端到端AI大模型;移动机器人 SLAM。近年来以第一/通讯作者身份在TRO、JFR、RAL、ICRA等机器人领域顶级期刊和会议上发表高质量论文十余篇。曾获得IROS2018最佳学生论文奖和TRO最佳论文提名奖。
原文链接:https://mp.weixin.qq.com/s/WXK-gZc1CZ1dPALkk3XYAQ


