上海交通大学智能网联电动汽车创新中心团队在IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024上发表题为"Non-repetitive: A Promising LiDAR Scanning Pattern" 的研究论文,文章主要探讨了一种新颖的非重复式激光雷达扫描方式,为自动驾驶中利用激光雷达进行3D点云感知提供了新的可能性。本文一作是电子信息与电气工程学院自动化系2021级本科生谢昂宸,本文通讯作者是钱烨强。
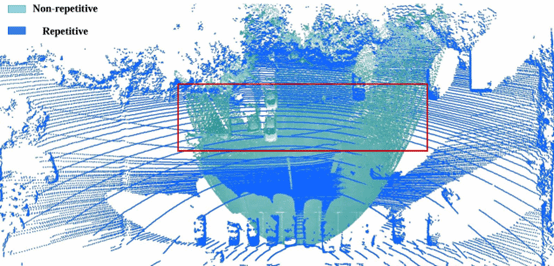
激光雷达是智能车辆中最受欢迎的传感器之一,可实时提供周围环境的数据。然而,近年来不同公司生产的车辆在激光雷达的扫描模式上存在显著差异:部分车辆使用机械或固态的重复式激光雷达,而另一些则采用基于棱镜的非重复式激光雷达。这些不同的扫描模式对激光雷达的感知性能产生了深远影响。
尽管重复式和非重复式激光雷达在扫描模式上存在巨大差异,目前针对这两种模式的对比研究却相对有限,特别是在驾驶场景下缺乏数据支撑的横向对比。然而,采用新颖扫描方式的非重复式激光雷达已在实际车辆中得到应用,显示了其在真实场景中的巨大潜力与可能性,这也使得针对不同扫描模式的激光雷达进行定量研究变得前景广阔且十分必要。
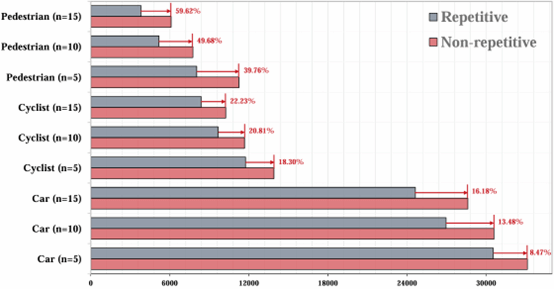
为综合解决上述问题,本论文提出了“Repetitive-or-not”数据集,这是一个基于CARLA仿真环境采集的、专门用于对比重复式和非重复式激光雷达的数据集,涵盖多种常见驾驶场景以及丰富的点云数据及其标注信息。该数据集已在Kaggle平台开源(https://www.kaggle.com/datasets/angchenxie/repetitive-or-not)。基于此数据集,论文深入研究了不同扫描模式对物体感知的影响,发现非重复式雷达对场景中的小型目标(如行人和自行车)更加敏感,为自动驾驶的感知环节提供了更多可能性。此外,论文还探讨了不同扫描模式对当前主流3D目标检测算法的影响,在证明非重复式扫描优越性的同时,为从重复式扫描模式向非重复式模式的过渡提供了新的见解。


谢昂宸,上海交通大学电子信息与电气工程学院自动化系2021级本科生,研究方向为自动驾驶感知、机器人技术。

钱烨强,上海交通大学电信学院自动化系,长聘教轨副教授,博士生导师。研究方向为智能驾驶感知与导航系统。近年来以第一/通讯作者身份在IEEE Transactions系列发表长文10余篇,主持包括国家自然科学基金面上、青年在内的多个项目。
原文链接:https://mp.weixin.qq.com/s/LWzFBfGcwxhlm2FQKap1hA


