上海交通大学智能网联电动汽车创新中心团队在老师杨明、张颂安指导下,于智能驾驶领域顶刊IEEE Transactions on Intelligent Transportation Systems (T-ITS)上发表题为"HOPE: A Reinforcement Learning-based Hybrid Policy Path Planner for Diverse Parking Scenarios"的研究论文。文章主要探讨了多样化狭窄泊车场景下一种基于强化学习的路径规划方法,为自动泊车规划方案设计提供了新的可能性,相关代码已开源在https://github.com/jiamiya/HOPE。本文共同第一作者是自动化与感知学院2023级硕士生蒋铭阳、2020级博士生李悦圆。

研究背景
自动泊车是提升驾驶安全性与效率的关键技术,但复杂多变的泊车场景对传统路径规划方法提出了巨大挑战。基于规则的几何或采样搜索方法在简单常见场景中表现可靠,但在狭窄车位或障碍物密集的环境中易陷入局部最优甚至规划失败。学习型方法(如强化学习)虽具备环境理解与探索能力,但训练效率低且难以稳定收敛。此外,近年来相关研究多局限于有限数量和种类的场景,泛化能力不足,且面临训练效率与部署安全性的难题。如何融合规则方法与学习方法的优势,实现高效、鲁棒且通用的泊车路径规划,成为亟待解决的核心问题。
研究成果
针对上述挑战,本文提出了一种基于强化学习的混合策略路径规划器。通过将强化学习策略与Reeds-Shepp曲线结合,在训练中通过规则方法引导智能体探索,提升训练效率与最终成功率。此外,为了应对神经网络策略安全性问题,本文设计了一种动作掩码方法,通过计算和编码碰撞约束,显著减少训练中的无效探索,并确保规划路径的安全性。
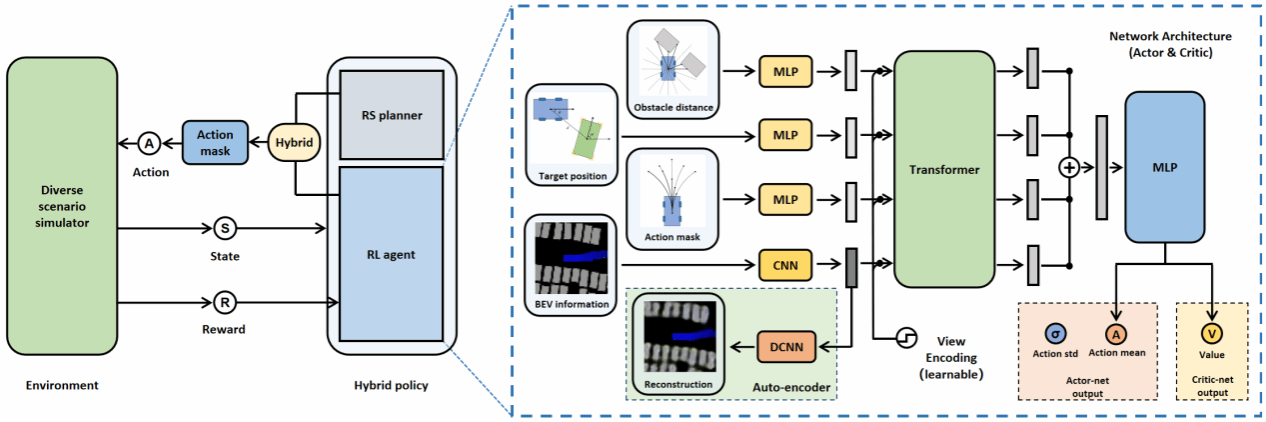
提出方法架构
实验表明,本文方法在模拟与真实场景中均表现优异:在各种狭窄的平行泊车和垂直泊车场景中规划成功率超过97%,显著优于传统方法。实车场景测试中,本文算法成功应对“断头路垂直泊车”等未训练过的复杂场景,验证了其泛化能力与工程实用性。
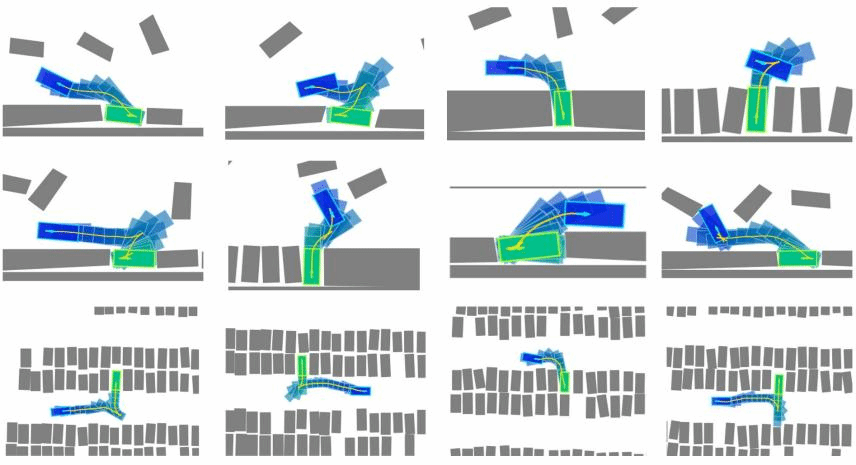
仿真实验可视化
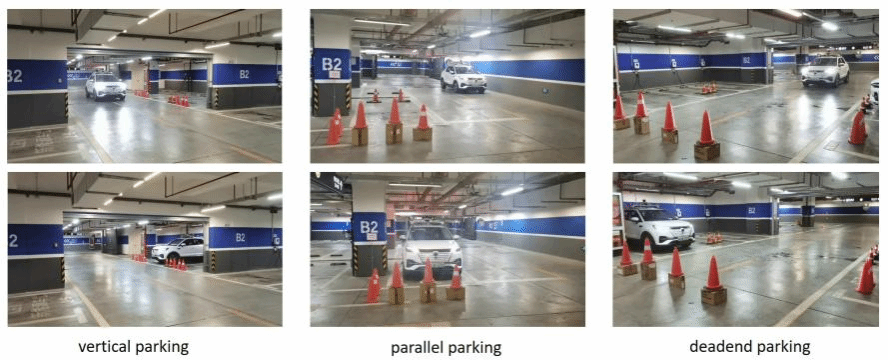
现实场景实验
实车实验视频
论文链接:https://ieeexplore.ieee.org/document/10938794
作者信息

蒋铭阳,上海交通大学自动化与感知学院2023级硕士研究生。研究方向:自动驾驶决策、基于强化学习的运动规划。

李悦圆,上海交通大学自动化与感知学院2020级博士研究生。研究方向:自动驾驶决策模型、交互模型、以及驾驶仿真。

张颂安,上海交通大学溥渊未来技术学院长聘教轨助理教授,博士生导师。毕业于美国密歇根大学机械工程学院,曾任美国福特汽车公司机器人研究所研究员。研究方向:智能车和机器人决策控制算法、强化学习、元强化学习、工业具身智能、AI辅助航空发动机设计。

杨明,上海交通大学自动化与感知学院特聘教授,博士生导师,密西根学院党委书记,智能网联电动汽车创新中心主任,国家“万人计划”科技创新领军人才。现任中国自动化学会智能车工委会副主任和教工委副主任、中国人工智能学会理事和智能机器人专委会副主任、IEEE IROS-CPRB副主编、《IEEE Transactions on Intelligent Vehicles》和《IEEE Transactions on Intelligent Transportation Systems》期刊编委。长期从事无人车和智能机器人等方面教学与研究工作,近年来在国内外学术刊物上发表论文200余篇,获国家发明专利授权50余项,指导学生多次获得IEEE Intelligent Vehicle Symposium、中国智能机器人大会等国内外顶级会议优秀论文。作为负责人,先后获得上海市技术发明一等奖、上海市教学成果一等奖、教育部技术发明奖等奖项。研究方向:低速无人驾驶系统。
原文链接:https://mp.weixin.qq.com/s/mI2juJYEQpvFmqZJhnOpZQ


