上海交通大学智能网联电动汽车创新中心团队在老师卢俊国、王亚飞指导下,于机械电子领域顶刊IEEE/ASME Transactions on Mechatronics (T-MECH)上发表题为“A Decision-making Algorithm of Multiple Reactive Tasks for Autonomous Driving Sweepers Based on Behavior Trees”的研究论文。文章主要探讨了在多反应式任务管理场景下一种基于引入智能控制节点与高效构建方法的行为树的行为决策方法,为智能驾驶清扫车在复杂任务环境下的高效调度与连续执行提供了新的实现路径。本文第一作者是自动化与感知学院2022级博士生康弘毅。
研究背景
随着自动驾驶技术在环卫领域的加速应用,智能驾驶清扫车作为提升城市管理智能化水平的重要设备,正逐步取代传统人工作业模式。这类车辆不仅需要完成自主行驶、避障与清扫任务,还需实时响应电量不足、垃圾满载等突发性需求,执行自主充电与卸料操作。相比一般道路车辆,清扫车在低速、相对受控环境下运行,但其决策任务更加多样化,需同时兼顾常规任务与紧急反应任务,确保作业连续性与效率。有效管理这些任务对决策系统提出了更高要求,需要具备模块化、灵活性和实时响应能力的智能决策机制,以适应复杂动态环境并提升整体作业可靠性。
研究现状
针对智能驾驶清扫车的多任务决策需求,现有研究多采用基于规则的方法,如有限状态机(FSM),以简化任务管理与转移逻辑。然而,FSM在复杂环境中易出现状态爆炸与切换困难,缺乏足够灵活性。为提升决策系统适应性,部分工作引入了基于概率推理的方法,如POMDP,以处理不确定性场景,但在极端条件下易受累积误差影响。近年来,学习型方法(如深度强化学习)凭借自适应能力在决策研究中取得进展,但难以保证关键任务的绝对正确性与安全性。总体而言,现有方法在同时兼顾常规任务与突发反应任务管理方面仍存在不足,亟需一种兼具安全性保障与高效调度能力的多任务决策框架,尤其适用于强调实时性与可靠性的应用场景。
研究成果
针对上述现有方法在多反应式任务处理中的不足,本文提出了一种基于行为树的决策方法,通过设计 SmartSequence 与 SmartFallback 两种智能控制节点,实现了在每个决策周期内灵活触发必要的反应式任务检查,同时有效避免常规任务执行中的冗余开销。此外,结合智能节点特性,本文进一步提出了改进版PPA(Postcondition-Precondition-Action)建树方法,实现了行为树结构的动态高效构建,在保障决策逻辑正确性的同时,显著优化了树结构复杂度与决策延迟。
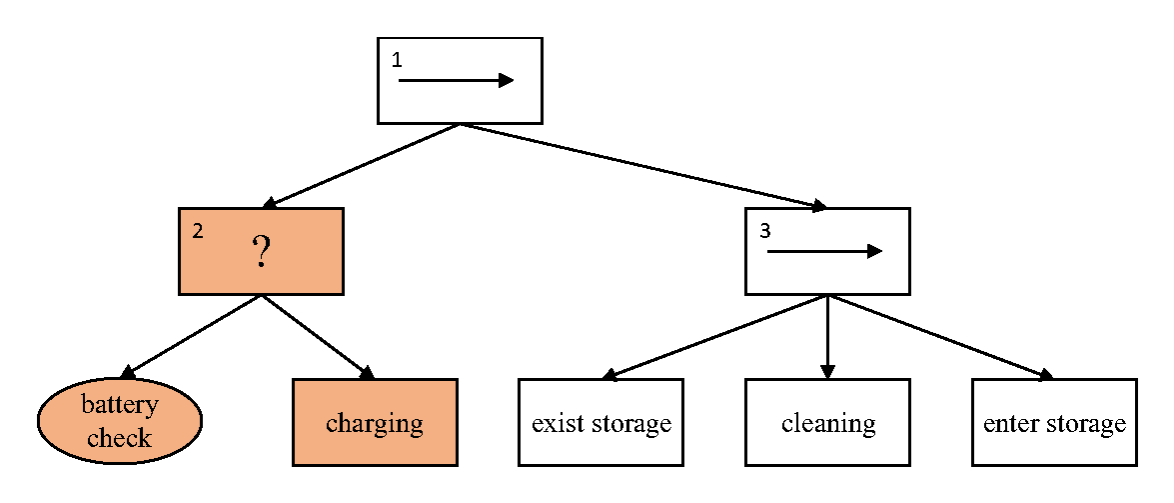
传统行为树(包含反应式任务:电量不足检测)

传统行为树(包含多反应式任务:电量不足检测、垃圾满载检测)
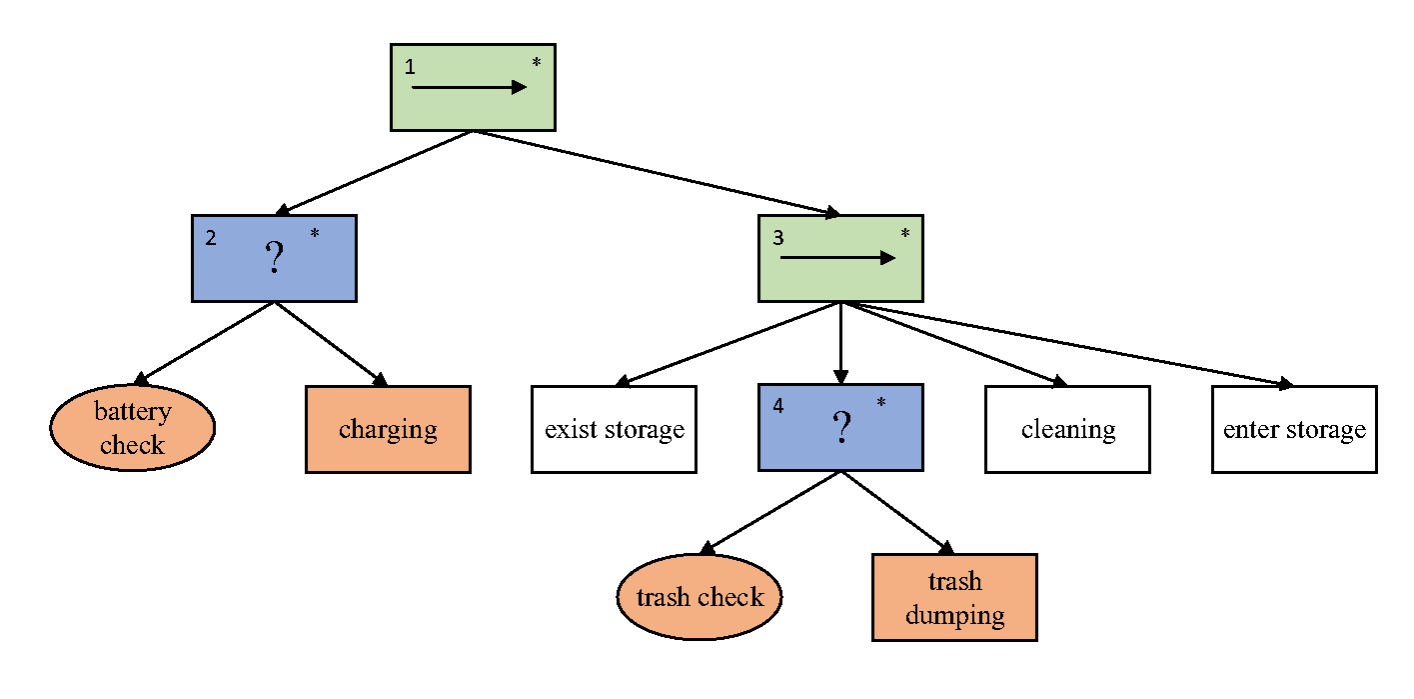
采用智能节点的多反应式任务行为树
在仿真实验中,本文基于Gazebo搭建了模拟作业环境,设定了车辆从起点行驶至终点的常规清扫任务,并在行驶过程中通过模拟电量不足或垃圾满载等异常信号,动态触发前往其他指定点位的反应式任务,以验证方法在任务切换与恢复过程中的连贯性与实时性。随后,基于实际部署的自主清扫车平台,开展了真实场景下的实验,测试了车辆在清扫过程中动态切换至充电或倾倒垃圾任务后的连续性与可靠性。实验结果表明,所提方法在多轮反应式任务管理中展现出良好的决策效率与系统稳定性,在决策时间与任务连贯性方面相较基线方法具有明显提升。

仿真实验环境搭建示意

仿真执行过程示意
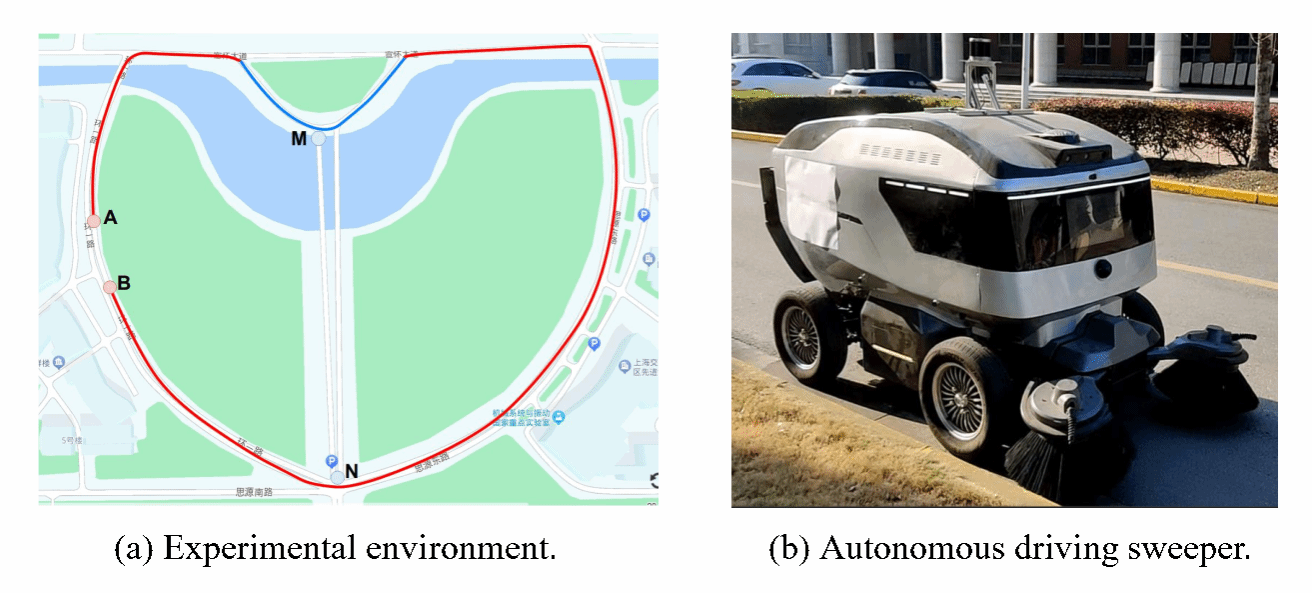
实车实验配置:(a)实验环境;(b)自主驾驶清扫车

电量检测反应式任务的实车运行过程展示

垃圾检测反应式任务的实车运行过程展示
作者信息

康弘毅,上海交通大学自动化与感知学院2022级博士研究生。研究方向:自动驾驶规划、决策、预测。

卢俊国,上海交通大学自动化与感知学院长聘教授、博导,中国自动化学会“分数阶系统与控制专业委员会"副主任,航空电子综合与体系集成全国重点实验室、系统控制与信息处理教育部重点实验室骨干成员。连续九年入选爱思唯尔(Elsevier)中国高被引学者,连续五年入选全球前2%顶尖科学家榜单。近年发表期刊学术论文100余篇,在Scopus上引用超过4800余次,H指数为33;ESI(Essential Science Indicators)高被引论文4篇、热点论文1篇。现任SCI收录国际期刊Sensors编委,International Journal of Systems, Control and Communications编委,曾任SCl收录国际期刊International Journal of Bifurcation and Chaos的Guest Associate Editor等。主持国家自然科学基金5项,长三角科技创新共同体联合攻关重点任务课题1项,上海市自然科学基金1项等纵向科研项目;承担(参与)J科技委重点项目1项,国家科技部国际热核聚变实验堆(ITER)计划专项课题1项,国家自然科学基金重点项目2项,国家863计划重点课题1项等纵向科研项目。主持上海交大——龙马环卫城市智能服务机器人联合实验室项目1项(1500万)等重要产学研合作项目。研究方向:智能机器人,无人驾驶,仿人双足机器人,智能机械臂,特种机器人等。

王亚飞,上海交通大学机械与动力工程学院教授,入选国家高层次青年人才、交通运输部青年拔尖人才。主持科技部重点研发计划课题、国家自然科学基金和企事业单位合作项目40余项,发表中英文论文100余篇,授权国内外发明专利40余项,参与制定发布国家标准7项,获国际学术会议最佳论文奖/提名奖4项。现任IEEE Vehicular Technology Magazine副主编、ASME Journal of Dynamic Systems, Measurement, and Control副主编、《汽车工程学报》编委、《传动技术》编委、《汽车工程》青年编委、《中国公路学报》青年编委、中国汽车工程学会青委会副秘书长等职。研究方向:特种车辆无人驾驶建图与规划、车路协同感知定位。
原文链接:https://mp.weixin.qq.com/s/1QQJCQUvXGcMf7eNcILZWA


