2025年国际智能车大会(IEEE Intelligent Vehicles Symposium 2025)于6月22日至6月25日在罗马尼亚克卢日—纳波卡举办,会议汇聚全球智能车辆研究者,通过学术交流分享研究成果,深入探讨智能车领域的最新发展动态。本次会议共接收341篇会议论文和31篇workshop论文。
上海交通大学智能网联电动汽车创新中心(下简称“中心”)的庄瀚洋老师参加了此次会议,并在会上发表题为” Pose Tracking of Leading Vehicle using Mass-produced Sensors” 的研究论文。文章主要探讨了如何利用低成本量产传感器实现高精度的前车位姿跟踪,并能够在前车大曲率转弯、掉头等任意行驶轨迹下保持稳定跟随,为车辆自主跟驰提供可靠的感知基础。
研究背景
当前L2级别的自动跟车功能,通常利用车道线保持横向的跟驰控制,在园区、城市等车道线缺失、道路曲率较大的场景下难以实现稳定的前车位姿跟踪,从而无法实现自主跟驰。通常这种精确的前车位姿跟踪需要依赖昂贵的激光雷达传感器,但其对于乘用车来说成本仍旧较高,因此本研究希望通过低成本车辆传感器实现高精度的前车位姿跟踪。
研究成果
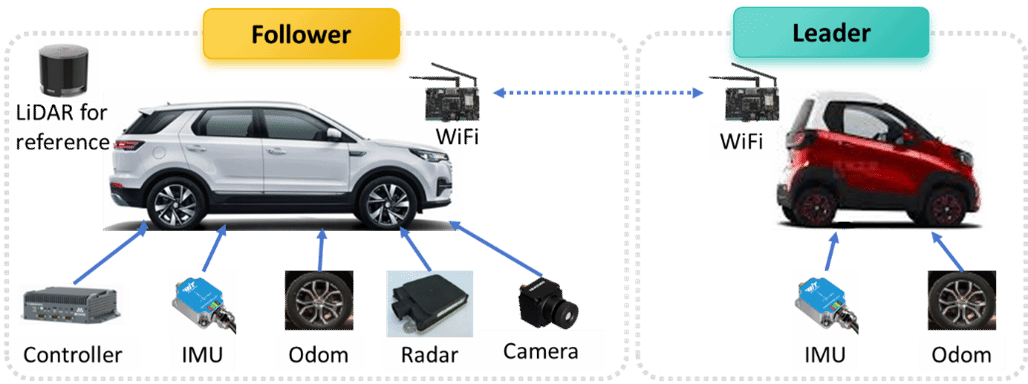
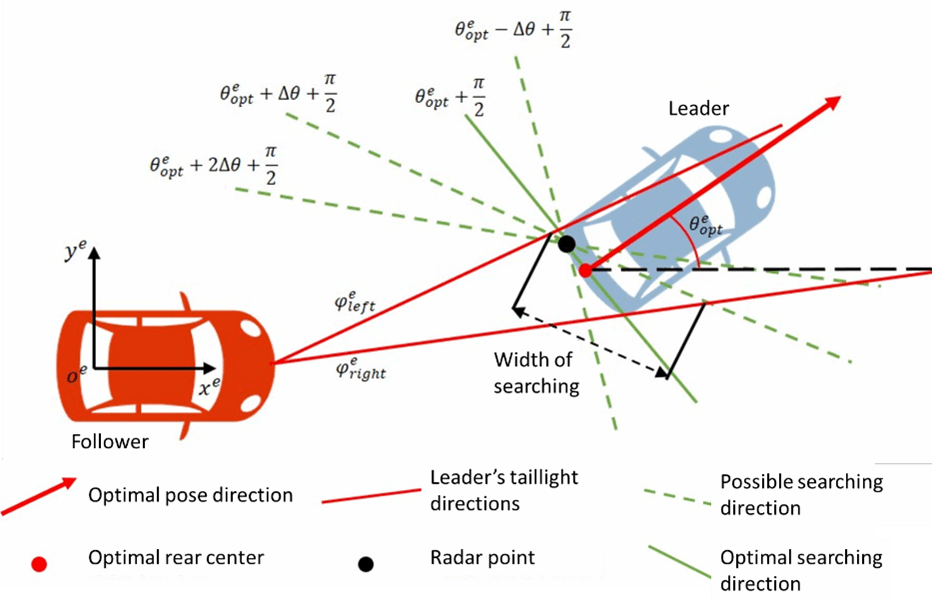
为解决上述问题,本文提出了一种使用量产传感器的前车跟踪框架,包括前置鱼眼摄像头、前置毫米波雷达和无线通信设备。该框架由三个模块组成:1)视觉特征跟踪模块,使用 DiMP 跟踪器对尾灯特征进行鲁棒跟踪;2)视觉-雷达融合模块,用于估计前车后中心作为参考点跟踪;3)前车姿态跟踪模块,在粒子滤波框架中结合传感器数据和车间通信,实现三自由度的精确姿态跟踪。实车道路实验表明,本文方法能够在各类大曲率转弯、掉头等场景下准确复刻前车位姿和轨迹,为车辆自主跟驰能力提供稳定可靠的感知数据基础。
论文信息:
Hanyang Zhuang, Haoran Wu, Chunxiang Wang and Ming Yang*, Pose Tracking of Leading Vehicle using Mass-produced Sensors, 2025 IEEE Intelligent Vehicles Symposium (IV2025), Jun. 22-25, 2025, Cluj-Napoca, Romania
作者信息

庄瀚洋,上海交通大学密西根学院,助理研究员,智能网联电动汽车创新中心成员。近年来主持国家自然科学基金青年项目以及多项产学研合作项目,共发表论文40余篇。研究方向:车路协同自动驾驶。

杨明,上海交通大学自动化与感知学院,特聘教授,博士生导师,密西根学院党委书记,智能网联电动汽车创新中心主任,国家“万人计划”科技创新领军人才。现任中国自动化学会智能车工委会副主任和教工委副主任、中国人工智能学会理事和智能机器人专委会副主任、IEEE IROS-CPRB副主编、《IEEE Transactions on Intelligent Vehicles》和《IEEE Transactions on Intelligent Transportation Systems》期刊编委。长期从事无人车和智能机器人等方面教学与研究工作,近年来在国内外学术刊物上发表论文200余篇,获国家发明专利授权50余项,指导学生多次获得IEEE Intelligent Vehicle Symposium、中国智能机器人大会等国内外顶级会议优秀论文。作为负责人,先后获得上海市技术发明一等奖、上海市教学成果一等奖、教育部技术发明奖等奖项。研究方向:低速无人驾驶系统。
原文链接:https://mp.weixin.qq.com/s/rgADpbRomoSZD1f14Jaygg


