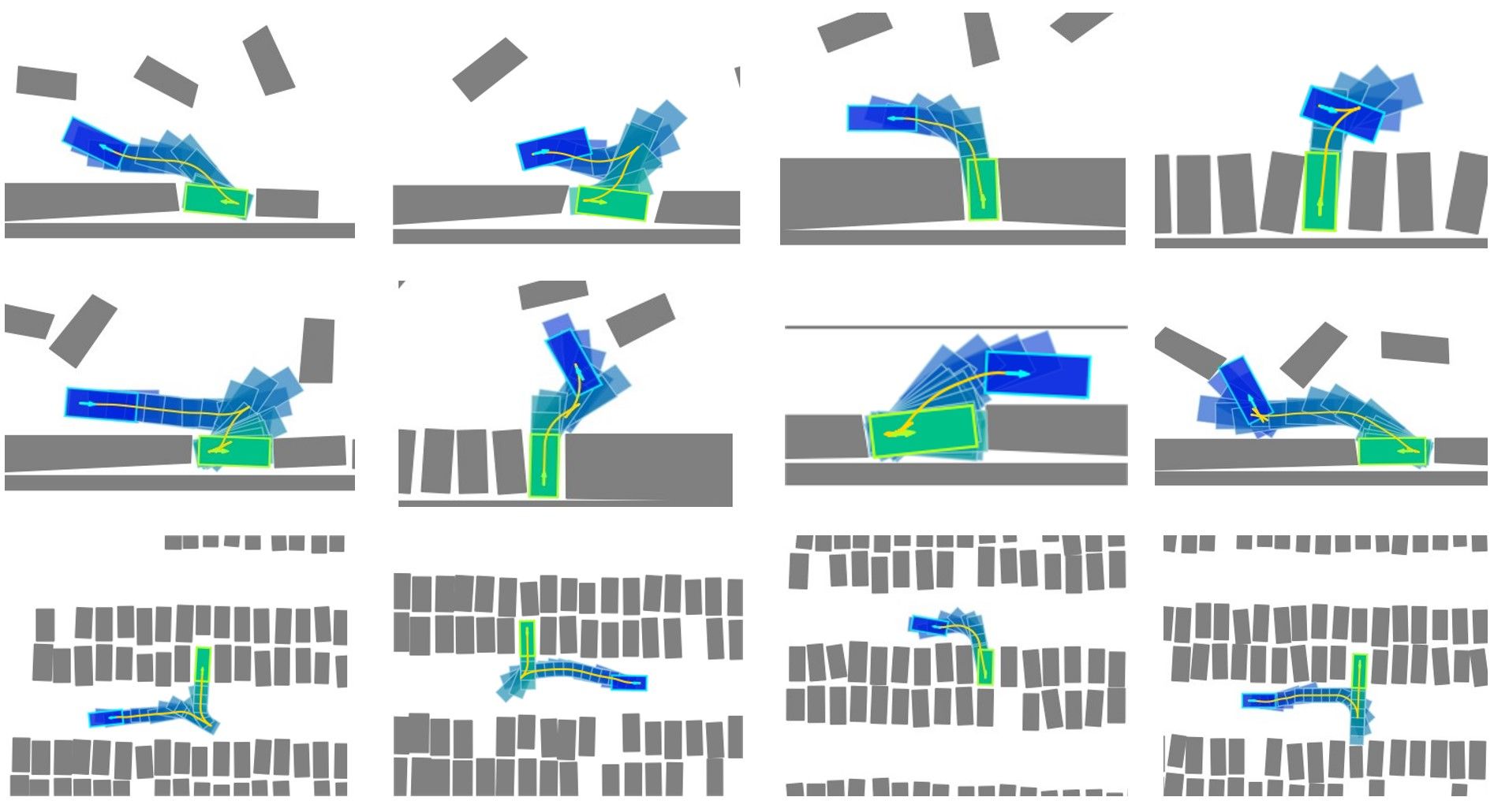
该代码库对应论文"HOPE: A Reinforcement Learning-based Hybrid Policy Path Planner for Diverse Parking Scenarios"。本研究针对泊车场景中的路径规划任务提出了一种新颖的解决方案。该规划器将强化学习智能体与Reeds-Shepp曲线相结合,能够在多种复杂场景中实现高效路径规划。HOPE通过引入动作掩码机制,引导强化学习智能体的探索过程,并利用Transformer模型融合环境感知信息与动作掩码。与典型的基于规则的算法和传统强化学习方法相比,HOPE在具有挑战性的案例中表现出更高的规划成功率。
代码库:https://github.com/jiamiya/HOPE


